RaS píše:ty si podle mě pleteš pojem driver a kontroler, řídící systém..
Asi máš pravdu, že po pár upřesněních výše mám zmatek ve více pojmech nejenom v pojmech: driver a kontroler, řídící systém. Abych trochu zúžil hodně široké téma, tak v dalších úvahách pro svůj účel hobby stroje uvažuji systém se servy bez lineárních pravítek. Od krokáčů jsem po upozorněni na možný výpadek kroku, začal zvažovat serva. Tím jsem nechtěně otevřel Pandořinu skříňku, kterou mi halí tma neznalostí

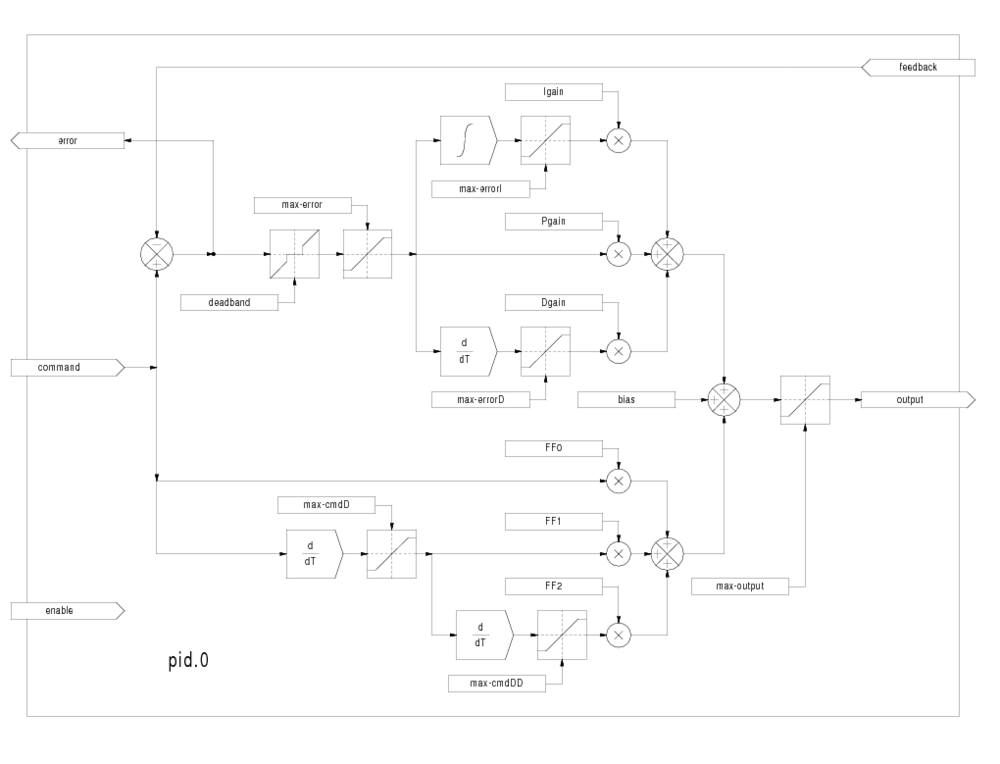
Teď vím, že mám při výběru hobby serva hlídat, že lze řídit pomocí step/dir a (z jiné diskuse) je vím, že je vhodné mít u serv i feedforward funkci).
Mám zmatek asi hlavně v tom, co je myšleno kontrolerem.
Měl jsem zato, že z PC připojím vstupy přímo do driverům pro všechny osy.
Kontroler jsem myslel, že je něco, co nutně nepotřebuji, že je to něco pro ruční polohování ( něco jako
http://www.cncshop.cz/ovladace-mpg_c" onclick="window.open(this.href);return false; )
Zkusím shrnout, jak pojmy (ne)chápu já:
Zpětná vazba = dává infromac, zda se pohon(motor) pootočil, tak jak dostal pokyn. Je zajištěna buď resolverem nebo encoderem (obecně vzato asi bude existovat daleko více způsobů ....)
Encoder = Může být součástí serva. Umí dávat zpětnou vazbu o pohybu tj. „kolik otáček ve skutečnosti proběhlo“ nebo i absolutním počtu otáček . Tj. dá se z něho odvodit úhlová poloha osy serva (
http://en.wikipedia.org/wiki/Rotary_encoder" onclick="window.open(this.href);return false; )
Resolver – Může být součástí serva a umožňuje zpětnou vazbu. Dle toho, co jsem pochopil, tak není v nabídce příliš rozšířený, tak se nebudu dál zbývat tím, zda umožňuje absolutní zpětnou vazbu nebo jen komutování (jak píše „testone“)
Servo = motor s encoderem nebo elespoň s resolverem. Připojuje se k driveru napajecím kabelem a encoder kabelem
Driver = řídí servo a umí vyhodnocovat I signály z encoderu. Tj. překládá nízkonapěťové pokyny z PC na silové pokyny do motoru (resp. serva) a umí poslouchat zpětnou vazbu od enkodéru serva.
Řídící systém = Předpokládám, že je tím myšleno PC s interpretem G-kódu vysílající pokyny ve formátu step/dir. Například na LPT portu RS232 (někde se píše o RS422) na daném PINu vysílá napětí 0 nebo +X. (například Mach3, EMC) primo do driveru nebo přes Inreface board (zajišťující například optické oddělení apod.). Například v MACH3 se definuje, který PIN LPT portu řídí v každé ose Step a Dir
Prosím o nasměrování, co je myšleno pod pojmem “kontroler”?
Díky