
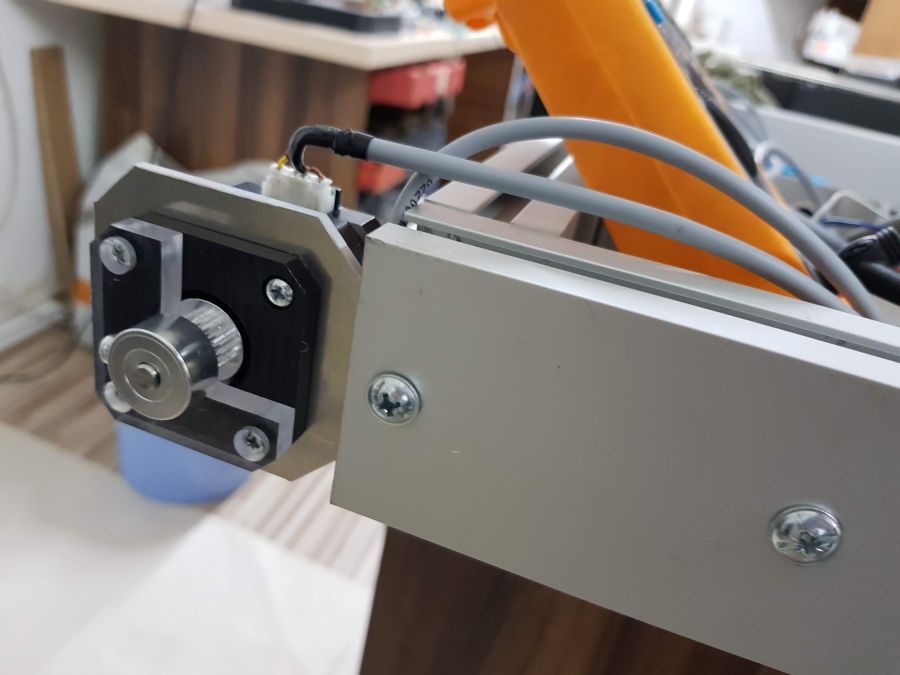
Motory už se hýbou tak teď ještě připevnit na strop a doladit SW
A protože zatím to není ještě kompletní, tak tady je obrázek jak by to mělo nakonec fungovat...
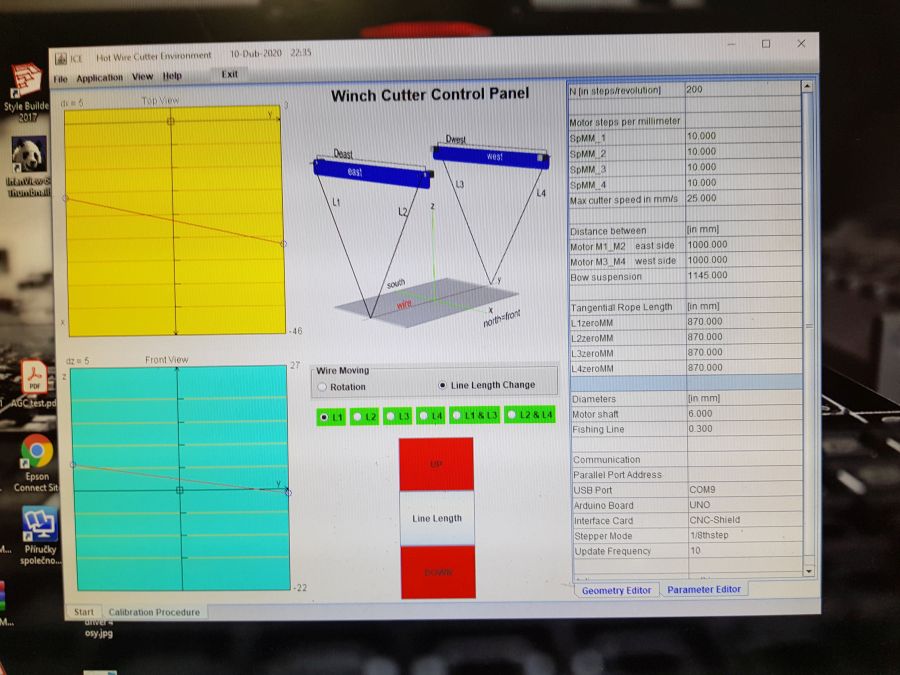


Aha- tak to vyzerá na prvý pohľad zložito. .quak píše: ↑11. 4. 2020, 3:13 Arduino tam je, ale GRBL nikoliv. Sám bych mu asi dal přednost, Ale nenašel jsem nikde možnost přepnout GRBL do režimu paralelní kinematiky což je tento případ. Běžně GRBL pracuje s lineárním XYZ v souřadnicovým systémem a nebo tzv. CORE XY ( ten už se taky nějakou dobu chystám vyzkoušet).
Tady je úplně jiná matematika pro generování pulzů pro motory. Když si představíš, že potřebuješ aby se horký drát plynule posouval vodorovným směrem, pak nejdříve se motory vlevo odvíjejí velmi pomalu zatímco motory vpravo se přitahují rychleji, uprostřed dráhy se rychlosti motorů vyrovnají a když horký drát dojede napravo tak je třeba rychleji uvolňovat řemen nalevo a velmi pomalu přitahovat napravo… A co teprve když potřebuješ vyříznout kružnici, která je na kraji pracovního prostoru.
Tento systém navíc umí každou stranu ovládat zvlášť, takže lze vyříznout například kužel (motory na levé straně opisují malou kružnici, a motory napravo větší kružnici, horký drát se tak naklání). Využívají toho modeláři když z jednoho bloku polystyrenu naráz vyříznou celé křídlo, které má z podstaty věci na jednom konci jiný profil než na druhém konci.
A nejlepší na tom je že ta mechanická konstrukce je v podstatě velmi jednoduchá a o zbytek se postará software.

